
Training Object Detection for Sequential Data
In this tutorial we will illustrate the training pipeline that we have used in the detection and tracking tutorial. The Moving-Mnist Dataset will be used for illustration purpose.
First, let’s import some libraries required for this tutorial.
import os
import argparse
# For Display
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['figure.figsize'] = [11, 11]
# For training
import torch
import pytorch_lightning as pl
from pytorch_lightning.callbacks import ModelCheckpoint
from pytorch_lightning.loggers import TensorBoardLogger
from metavision_ml.detection.lightning_model import LightningDetectionModel
Toy-Problem Dataset
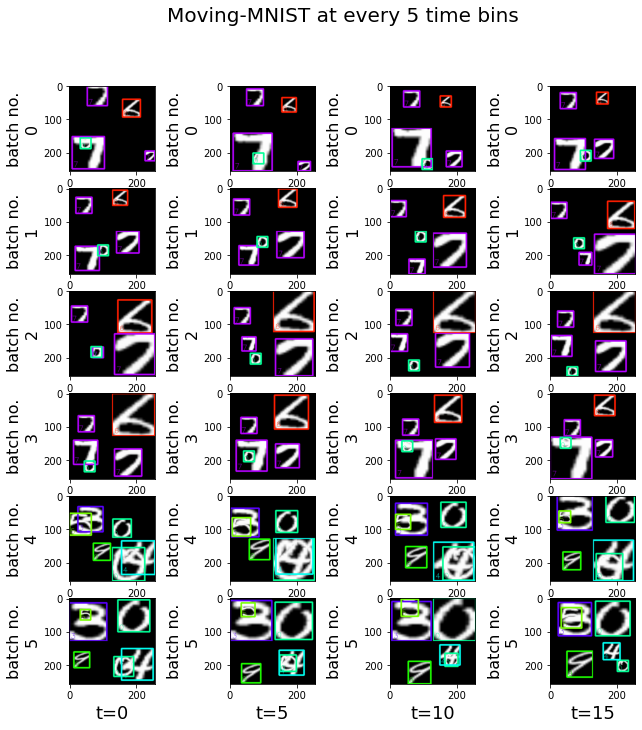
For our first training, we will use “Moving-Mnist” Dataset. This is a convenient dataset that can act as a “sanity-check” of the training pipeline. The dataset delivers video-clips of moving digits with their corresponding boxes.
Create a dataloader
You can create a dataloader with the make_moving_mnist function in the class metavision_ml.data.moving_mnist.
# Let's visualize Moving-Mnist data
from metavision_ml.data import box_processing as box_api
from metavision_ml.data.moving_mnist import make_moving_mnist
# input parameters
batch_size = 4
height, width = 128, 128
tbins = 20
dataloader = make_moving_mnist(train=True, height=height, width=width, tbins=tbins, num_workers=1, batch_size=batch_size, max_frames_per_video=80, max_frames_per_epoch=8000)
Create the labels
label_map = ['background'] + [str(i) for i in range(10)]
print('Our Label Map: ', label_map) #We see the classes of MNIST
Our Label Map: ['background', '0', '1', '2', '3', '4', '5', '6', '7', '8', '9']
Batch the recording streams in one grid cell
nrows = 2 ** ((batch_size.bit_length() - 1) // 2) # distribute all batches evenly over the grid
ncols = batch_size // nrows
grid = np.zeros((nrows, ncols, height, width, 3), dtype=np.uint8)
Load 6 batches to plot the digits along the time sequence (tbins)
from itertools import islice
from metavision_ml.detection_tracking.display_frame import draw_box_events
num_batches = 6
show_every_n_tbins = 5
fig, axes_array= plt.subplots(nrows=num_batches, ncols=tbins//show_every_n_tbins)
for i, data in enumerate(islice(dataloader, num_batches)):
batch, targets = data['inputs'], data['labels']
print('\n'+'batch nr.{} of shape:{}'.format(i, batch.shape))
print('set mask on/off: {}'.format(data['mask_keep_memory'].view(-1).tolist()))
for t in range(len(batch)):
grid[...] = 0
for n in range(batch_size):
img = (batch[t,n].permute(1, 2, 0).cpu().numpy()*255).copy()
boxes = targets[t][n]
boxes = box_api.box_vectors_to_bboxes(boxes=boxes[:,:4], labels=boxes[:,4]) #convert normal bbox to our EventBbox
img = draw_box_events(img, boxes, label_map, thickness=3, draw_score=False)
grid[n//ncols, n%ncols] = img
im = grid.swapaxes(1, 2).reshape(nrows * height, ncols * width, 3)
if t%show_every_n_tbins == 0:
axes_array[i, t//show_every_n_tbins].imshow(im.astype(np.uint8))
axes_array[i, t//show_every_n_tbins].set_xlabel("t="+str(t), fontsize=18)
axes_array[i, t//show_every_n_tbins].set_ylabel("batch no.\n" + str(i), fontsize=16)
plt.suptitle("Moving-MNIST at every 5 time bins", fontsize=20)
batch nr.0 of shape:torch.Size([20, 4, 3, 128, 128])
set mask on/off: [0.0, 0.0, 0.0, 0.0]
batch nr.1 of shape:torch.Size([20, 4, 3, 128, 128])
set mask on/off: [1.0, 1.0, 1.0, 1.0]
batch nr.2 of shape:torch.Size([20, 4, 3, 128, 128])
set mask on/off: [1.0, 1.0, 1.0, 1.0]
batch nr.3 of shape:torch.Size([20, 4, 3, 128, 128])
set mask on/off: [1.0, 1.0, 1.0, 1.0]
batch nr.4 of shape:torch.Size([20, 4, 3, 128, 128])
set mask on/off: [0.0, 0.0, 0.0, 0.0]
batch nr.5 of shape:torch.Size([20, 4, 3, 128, 128])
set mask on/off: [1.0, 1.0, 1.0, 1.0]
Text(0.5, 0.98, 'Moving-MNIST at every 5 time bins')
Note
the mask is “ON” every 4 batches, because the “max_frames_per_video” we defined is four times the number of time bins. This mask is used by the RNN API to reset the hidden state.
we grouped all the recordings of one batch into one grid cell and plot them over the time sequence (time bins). Since it is difficult to see the difference between neighboring time bins, we only plot the movement every 5 time bins.
Single-Shot Detector with RNN
As we are doing object detection on sequential event streams, the conventional detection algorithm needs to be adapted accordingly. In Metavision, the object detection model is trained with a Single-Shot Detector (SSD) with RNN. The model architecture is illustrated in the figure below:
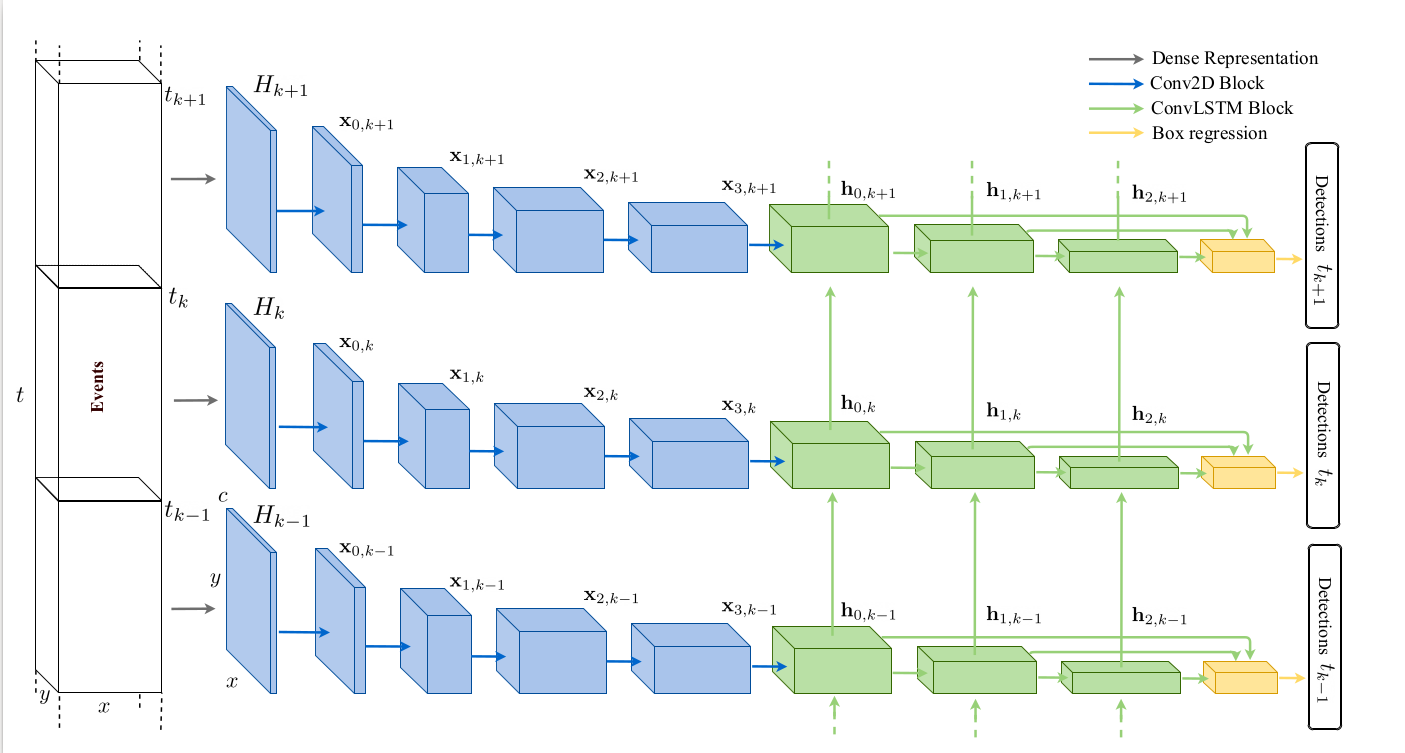
Our SSD model is composed of three main parts:
Feature extractor, containing a base network (indicated in blue) and a multi-scale feature extractor (indicated in green)
2-Head Predictor (indicated in yellow)
Non-maximum Suppression [NMS] (contained in the last black box)
The event-based data stream, after being processed into tensors, is passed first through the base Network to extract basic features. Then a series of multi-scale ConvRNN filters are added to extract features at multiple scales. The extracted features are then concatenated and passed to 2-head predictor to detect objects at multiple scales.
Note
Unlike conventional illustration of RNN model, the temporal dimension here is shown on the vertical axis, so this RNN is unrolled vertically.
The input tensors are of shape (T,B,C,H,W). For more details on how to create tensors from events, see our preprocessing tools tutorials. For everything related to the RNN layers, see our Pytorch RNN API tutorial.
Each component of the SSD model is self-contained, so you can easily set up a custom SSD model by using a different feature extractor or predictor.
Now, let’s dive into each key component of the model.
Feature Extractor
Let’s pass a randomly generated tensor x to our Vanilla feature extractor.
from metavision_ml.detection.feature_extractors import Vanilla
T,B,C,H,W = 10,3,3,height,width #num_tbins, batch_size, no. input features, height, width
x = torch.randn(T,B,C,H,W)
# get the feature extractor
rnn = Vanilla(C, base=64)
features = rnn(x)
# Notice That the output is flattened (time sequence is hidden in the batch dimension)
for i, feat in enumerate(features):
print('feature#'+str(i)+": ", feat.shape) #(TxB,C,H,W)
feature#0: torch.Size([30, 256, 16, 16])
feature#1: torch.Size([30, 256, 8, 8])
feature#2: torch.Size([30, 256, 4, 4])
feature#3: torch.Size([30, 256, 2, 2])
feature#4: torch.Size([30, 256, 1, 1])
The result above shows a list of extracted features. They decrease in
size progressively to allow a better detection across different object
sizes. In this example, the Vanilla feature extractor conveys 5
spatial levels.
Anchor Boxes
Anchor Boxes are not mentioned in the three components mentioned above. But they are a key feature in SSD. To help detect objects of various shapes, we set a grid of canonical rectangles called “anchor boxes” tiled on the feature maps. Since the feature maps are extracted from different scales, the anchors are also of different sizes.
Let’s visualize the default Anchor boxes provided in Metavision:
1. Initialize the Anchors class.
from metavision_ml.detection.anchors import Anchors
from metavision_ml.detection.rpn import BoxHead
from metavision_ml.detection.box import xywh2xyxy
num_classes = 10
label_offset = 1 # classes are shifted because the first logit represents background
act = "softmax"
nlayers = 0
step = 60 # stepsize to sample from all the predicted bboxes
fill = 127
box_coder = Anchors(num_levels=rnn.levels,
anchor_list="PSEE_ANCHORS",
variances=[0.1, 0.2] if act == 'softmax' else [1, 1])
2. Sampling from the total anchor boxes
# Let's visualize the anchor prediction space
anchors_cxywh = box_coder(features, x)
anchors = xywh2xyxy(anchors_cxywh)
colors = [np.random.randint(0, 255, (3,)).tolist() for i in range(box_coder.num_anchors)]
img = np.zeros((H, W, 3), dtype=np.uint8)
img[...] = fill
anchors = anchors.cpu().data.numpy()
anchors = anchors.reshape(len(anchors) // box_coder.num_anchors, box_coder.num_anchors, 4)
anchors = anchors[7::step] # sampling from the total bboxes
anchors = anchors.reshape(-1, 4)
print(anchors.shape)
(36, 4)
3. Plot the sampled anchor boxes
fig, axes_array= plt.subplots(nrows=len(anchors)//(box_coder.num_anchors), ncols=box_coder.num_anchors, sharex=True, sharey=True)
for i in range(len(anchors)):
anchor = anchors[i] # get the coordinates of bbox
pt1, pt2 = (anchor[0], anchor[1]), (anchor[2], anchor[3])
pt1 = [int(v) for v in pt1]
pt2 = [int(v) for v in pt2]
ix, iy = i%box_coder.num_anchors, i//box_coder.num_anchors
img[...] = fill
cv2.rectangle(img, pt1, pt2, colors[i % box_coder.num_anchors], 2)
ptcxy = int((anchor[0] + anchor[2])/2), int((anchor[1]+anchor[3])/2)
cv2.circle(img, ptcxy, 1, (255,255,255), 2)
axes_array[iy,ix].imshow(img.astype(np.uint8))
axes_array[iy,ix].set_xlabel("Box no. {}".format(ix+1))
axes_array[iy,ix].set_ylabel("Prior centre. {}".format(iy+1))
plt.suptitle("Example of Anchor Boxes", fontsize=20)
Text(0.5, 0.98, 'Example of Anchor Boxes')
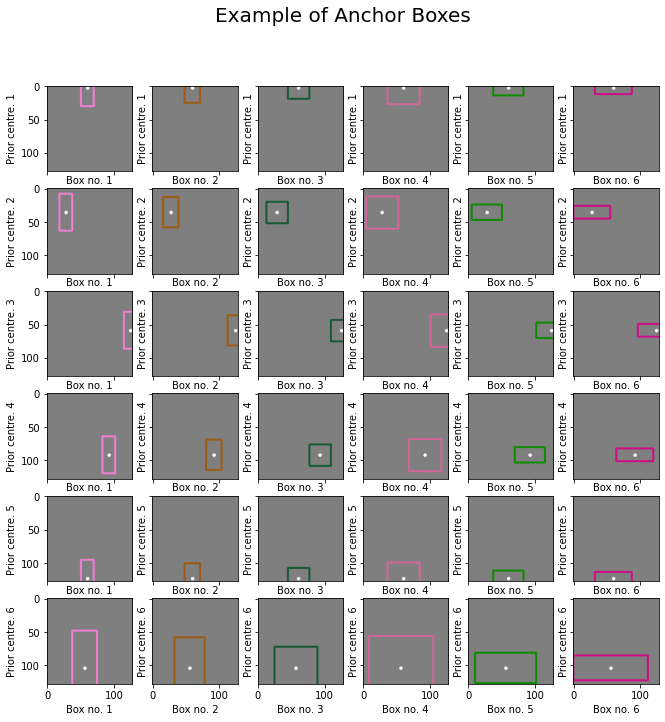
You can see that here we use 6 anchor boxes of different shapes and scales for each prior centre of the feature map.
Bounding Box Prediction
The model does not directly predict bounding boxes, but rather the probabilities and refinements which correspond to the anchor boxes mentioned above. This way, we can even detect overlapping objects.
In practice, the extracted features are passed to the two-head predictor, a regressor and a classifier, yielding a per-anchor prediction. For each anchor, the regressor predicts a vector of localization shifting and stretching (cx, cy, w, h), while the classifier predicts a vector of per-class probability.
1. Initialize the predictor
from metavision_ml.detection.box import deltas_to_bbox
import torch.nn as nn
# We build the predictor
pd = BoxHead(rnn.cout, box_coder.num_anchors, num_classes + label_offset, nlayers)
# let's jitter a bit the initialized localization prediction
# in our code we initialize to 10x smaller standard deviation around the anchor box
def initialize_layer(layer):
if isinstance(layer, nn.Conv2d):
nn.init.normal_(layer.weight, std=0.1)
if layer.bias is not None:
nn.init.constant_(layer.bias, val=0)
pd.box_head.apply(initialize_layer)
Sequential(
(0): ConvLayer(
(0): Identity()
(1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(2): ReLU()
)
(1): Conv2d(256, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
2. Get the predictions of bbox
# we get predictions for features
deltas_loc_preds, cls_preds = pd(features)
# we decode the bounding box predictions (without performing NMS and score filtering)
box_preds = deltas_to_bbox(deltas_loc_preds, anchors_cxywh).data.numpy()[0].astype(np.int32)
anchors = xywh2xyxy(anchors_cxywh).data.numpy()
box_preds = box_preds[::70]
anchors = anchors[::70]
3. Visualize some sampled anchors and their prediction
img[...] = fill
fig, axes_array= plt.subplots(nrows=len(anchors)//(box_coder.num_anchors), ncols=box_coder.num_anchors, sharex=True, sharey=True)
for i in range(len(box_preds)):
img[...] = fill
anchor = anchors[i]
pt1, pt2 = (anchor[0], anchor[1]), (anchor[2], anchor[3])
pt1 = [int(v) for v in pt1]
pt2 = [int(v) for v in pt2]
pred = box_preds[i]
ppt1, ppt2 = (pred[0], pred[1]), (pred[2], pred[3])
ppt1 = [int(v) for v in ppt1]
ppt2 = [int(v) for v in ppt2]
cv2.rectangle(img, pt1, pt2, (255,0,0), 1) # anchor box
cv2.rectangle(img, ppt1, ppt2, (0,0,255), 1) #prediction in blue
ptcxy = int((anchor[0] + anchor[2])/2), int((anchor[1]+anchor[3])/2)
cv2.circle(img, ptcxy, 1, (255,255,255), 2)
ix, iy = i%box_coder.num_anchors, i//box_coder.num_anchors
axes_array[iy,ix].imshow(img.astype(np.uint8))
axes_array[iy,ix].set_xlabel("Box no. {}".format(ix+1))
axes_array[iy,ix].set_ylabel("Prior centre. {}".format(iy+1))
plt.suptitle("Bounding Box prediction", fontsize=20)
Text(0.5, 0.98, 'Bounding Box prediction')
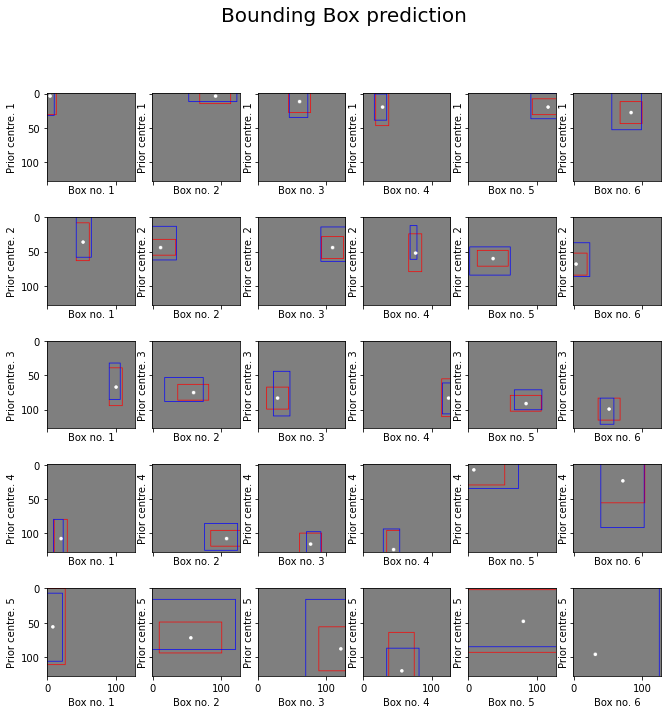
The predictions are shown in blue and the anchors are shown in red. In the last image, we cannot see the anchor boxes because they are at the edge or outside of the image.
NMS
Non-maximum suppression is a common strategy used in object detection. It helps prune redundant bounding boxes predicted for the same objects. Boxes with a low confidence score and IoU (Intersection over Union) less than a certain threshold are discarded.
Loss Calculation
Two loss functions are defined:
regression loss: e.g. smooth L1
classification loss: e.g. focal loss
To better see what the loss vectors look like, let’s run with the SSD model with moving-mnist dataset.
from itertools import chain
from metavision_ml.detection.losses import DetectionLoss
data = next(iter(dataloader))
targets = data['labels']
inputs = data['inputs']
features = rnn(inputs)
deltas_loc_preds, cls_preds = pd(features)
targets = list(chain.from_iterable(targets))
targets = box_coder.encode(features, x, targets)
print('class target: ', targets['cls'].shape) # the class target: for each anchor, the assigned class
print('localization target: ', targets['loc'].shape) # the localization target: for each anchor: the regression of difference w.r.t the anchor box
print(targets.keys())
class target: torch.Size([80, 2046])
localization target: torch.Size([80, 2046, 4])
dict_keys(['loc', 'cls'])
criterion = DetectionLoss("softmax_focal_loss")
loss = criterion(deltas_loc_preds, targets['loc'], cls_preds, targets["cls"])
print(loss.keys())
print(loss['loc_loss'], loss['cls_loss'])
dict_keys(['loc_loss', 'cls_loss'])
tensor(14.4300, grad_fn=<DivBackward0>) tensor(6.8745, grad_fn=<DivBackward0>)
Training with Pytorch-Lightning: Putting it together
Let’s now run a training loop with LightningDetectionModel of the class metavision_ml.detection.lightning_model. It is a module based on Pytorch-Lightning.
We need to set hyperparameters defining:
neural network architecture
loss
dataset path
training schedule…
Note
Run the training pipeline with our Python sample train_detection.py for a better user experience.
Warning
The training might be slow if you don’t have a GPU.
import shutil
tmpdir = 'toy_problem_experiment'
if os.path.exists(tmpdir):
shutil.rmtree(tmpdir)
params = argparse.Namespace(
in_channels= 3, # number of input channels
feature_base=8, # backbone width, number of channels doubles every CNN's octave
feature_channels_out=128, # number of channels out for each rnn feature
anchor_list='MNIST_ANCHORS', # anchor configuration
loss='_focal_loss', # type of classification loss
act='softmax', # multinomial classification
feature_extractor='Vanilla', # default architecture
classes=[str(i) for i in range(10)], # MNIST classes names
dataset_path='toy_problem', # our dataset
lr=1e-3, # learning rate
num_tbins=12, # number of time-steps per batch
batch_size=4,
height=128,
width=128,
max_frames_per_epoch=30000, # number of frames for one epoch
skip_us=0,
demo_every=2, # launch a demonstration on video every 2 epochs
preprocess = 'none', # type of preprocessing: in this case it is just RGB values, no event based data so far
max_boxes_per_input=500, # max number of boxes wa can detect on a single frame
delta_t=50000, # dummy duration per frame
root_dir=tmpdir, # logging directory
num_workers=4, # number of data workers, ie processes loading the data
max_epochs=4, # maximum number of epochs
precision=16, # training with half precision will help consume less memory
lr_scheduler_step_gamma=0.98, # learning_rate multiplication factor at each epoch
verbose=False, # Display CocoKPIs per category
)
model = LightningDetectionModel(params)
tmpdir = os.path.join(params.root_dir, 'checkpoints')
checkpoint_callback = ModelCheckpoint(dirpath=tmpdir, save_top_k=-1, every_n_epochs=1)
logger = TensorBoardLogger(
save_dir=os.path.join(params.root_dir, 'logs'))
trainer = pl.Trainer(
default_root_dir=params.root_dir, logger=logger,
checkpoint_callback=checkpoint_callback, gpus=1,
precision=params.precision,
max_epochs=params.max_epochs,
check_val_every_n_epoch=1,
accumulate_grad_batches=1,
log_every_n_steps=5)
trainer.fit(model)
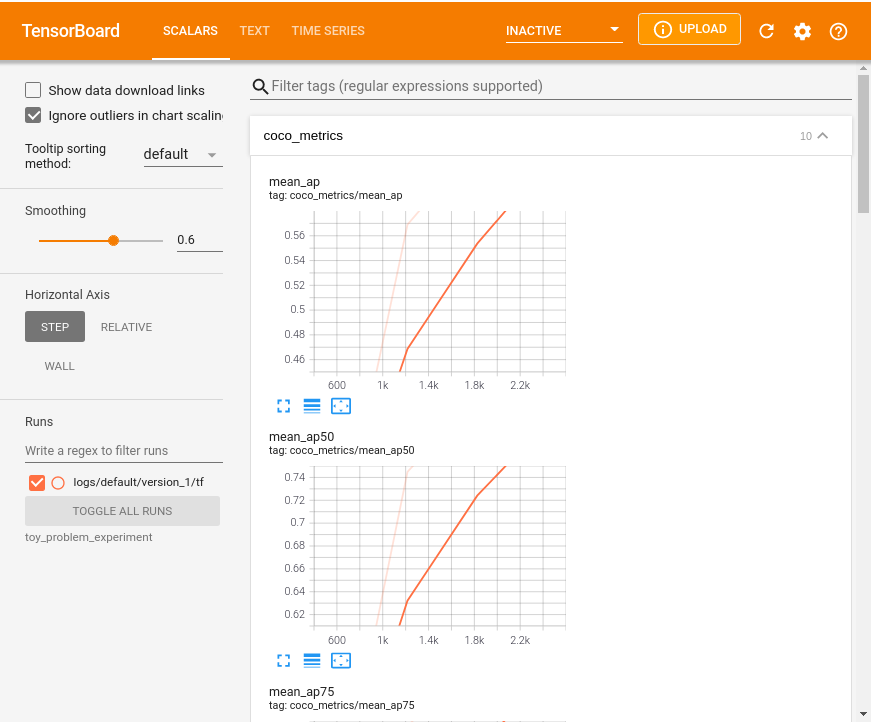
Visualize the TensorBoard, inspect the experiment directory
# Run tensorboard in the background
%load_ext tensorboard
%tensorboard --logdir toy_problem_experiment
Reusing TensorBoard on port 6006 (pid 7048), started 1:01:33 ago. (Use '!kill 7048' to kill it.)
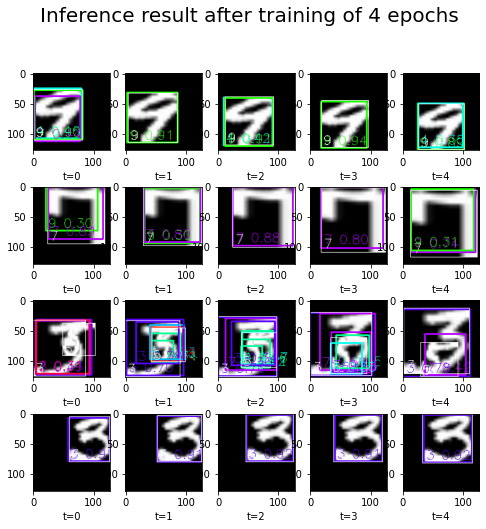
Network Inference
Our SSD model is trained! We can now run inference with some validation dataset..
Here, we also provide a function to visualize the result, which is similar to the “demo” function in our Lightning Model.
Before executing this code, download MNIST.ZIP and extract it in the folder from where you will run the Python code.
from itertools import islice
from metavision_ml.utils.main_tools import search_latest_checkpoint
from metavision_ml.data import box_processing as box_api
checkpoint_path = search_latest_checkpoint("toy_problem_experiment")
print('checkpoint path: ', checkpoint_path)
checkpoint = torch.load(checkpoint_path)
hparams = argparse.Namespace(**checkpoint['hyper_parameters'])
model = LightningDetectionModel(hparams)
model.load_state_dict(checkpoint['state_dict'])
model.eval()
num_batches = 1
batch_size = 4
height, width = 128, 128
tbins = 5
dataloader = MovingMNISTDataset(train=False, height=height, width=width, tbins=tbins, num_workers=1,
batch_size=batch_size, max_frames_per_video=10, max_frames_per_epoch=5000)
label_map = ['background'] + [str(i) for i in range(10)]
fig, axes_array = plt.subplots(nrows=batch_size, ncols=num_batches*tbins, figsize=(8,8))
# this is more or less the code inside the function "demo_video":
with torch.no_grad():
for batch_nb, batch in enumerate(islice(dataloader, num_batches)):
batch["inputs"] = batch["inputs"].to(model.device)
batch["mask_keep_memory"] = batch["mask_keep_memory"].to(model.device)
images = batch["inputs"].cpu().clone().data.numpy()
# inference
with torch.no_grad():
model.detector.reset(batch["mask_keep_memory"])
predictions = model.detector.get_boxes(batch["inputs"], score_thresh=0.3)
# code to display the results
for t in range(len(images)):
for i in range(len(images[0])):
frame = dataloader.get_vis_func()(images[t][i])
pred = predictions[t][i]
target = batch["labels"][t][i]
if isinstance(target, torch.Tensor):
target = target.cpu().numpy()
if target.dtype.isbuiltin or target.dtype in [np.dtype('float16'), np.dtype('float32'), np.dtype('float64'), np.dtype('int16'), np.dtype('int32'), np.dtype('int64'), np.dtype('uint16'), np.dtype('uint32'), np.dtype('uint64')]:
target = box_api.box_vectors_to_bboxes(target[:, :4], target[:, 4])
if pred['boxes'] is not None:
boxes = pred['boxes'].cpu().data.numpy()
labels = pred['labels'].cpu().data.numpy()
scores = pred['scores'].cpu().data.numpy()
bboxes = box_api.box_vectors_to_bboxes(boxes, labels, scores)
frame = draw_box_events(frame, bboxes, label_map, draw_score=True, thickness=2)
frame = draw_box_events(
frame, target, label_map, force_color=[
255, 255, 255], draw_score=False, thickness=1)
time = t + batch_nb * tbins
axes_array[i, t + batch_nb * tbins].imshow(frame.astype(np.uint8))
axes_array[i, t + batch_nb * tbins].set_xlabel("t="+str(time))
plt.suptitle("Inference result after training of 4 epochs", fontsize=20)
checkpoint path: toy_problem_experiment/checkpoints/epoch=3.ckpt
Text(0.5, 0.98, 'Inference result after training of 4 epochs')
Note
Some precomputed datasets for automotive detection are listed in the Datasets page and are available for download. You can use them for a longer training on real event-based data.
To run detection and tracking inference with our trained model, refer to Detection and Tracking Tutorial.